Източниците на електроенергия и техните бордови потребители се свързват помежду си, за да създадат бордова електрическа мрежа. Основните елементи на тази мрежа са свързващи проводници, защита от претоварване, средства за превключване (превключватели) и различни свързващи и превключващи устройства. Автомобилните електрически мрежи са DC 12 или 24V DC мрежи.За да се спестят разходите за проводници и да се опрости инсталирането на електрическо оборудване на автомобили, се използва едножилна система за предаване на енергия. Вторият свързващ проводник е каросерията на автомобила. Двупроводна система за предаване на енергия много рядко се използва в автомобилите: например за лампи за паркиране, които трябва да работят независимо от положението на превключвателя „маса“, звукови сигнали и т.н.За да се опростят отстраняването на неизправности в електрическите вериги, унифицирайте жиците на различни модели автомобили, опростете инсталирането и подменете сбруите в експлоатация, предпазителите и релетата в управляващите вериги на съвременните автомобили са конструктивно интегрирани в едно устройство, в този случай устройството е централно разпределително устройство, т.е. към които са свързани основните кабелни снопчета с помощта на щепселни накладки, които свързват двигателното отделение, панела с инструменти и задните лампи. 3 Като се има предвид значителната цена на медта, въпросът за икономията на разходите на проводниците в електрическите мрежи на автомобилите е спешен.
Предпазители.
Предпазителите са предназначени за защита на електрически вериги при претоварвания и къси съединения. Предпазителите са най-широко използвани, което представлява вложка от медна или алуминиева плоча с малка секция, изчислена на потока на тока на определена сила. Когато токът се увеличи с 50% над номиналната стойност, вложката се стопява и веригата се разрушава. След откриване и отстраняване на неизправности предпазителят се подменя.Предпазителите са интегрирани в един или повече монтажни блока, където могат да бъдат разположени и всички спомагателни релета.Термобиметални предпазители се състоят от корпус с неподвижен контакт и биметална плоча с контакт, като двата контакта са притиснати заедно. Плочата се загрява бързо и се охлажда бавно, така че контактите ще останат отворени за по-дълго време и, въпреки късото съединение, средният ток във веригата ще бъде малък. Когато плочата се охлади, контактите ще се затворят отново. Това ще продължи, докато веригата не бъде прекъсната от превключвателя или отстраняване на повредата.
Устройства за намаляване на радиосмущенията.
При работа на електрическо оборудване между електродите на разпределителя и свещи, контактите на електрическите устройства, както и между четките и контактните пръстени на генератора, четките и колектора на електродвигателя създава искра, която причинява появата на високочестотни електромагнитни вълни, които излъчват смущения. Особено силни препятствия създават запалителната система.
Потискането на смущения се постига по различни начини и в зависимост от източника на смущения и изискванията за степента на тяхното потискане. Следните устройства са въведени на превозни средства, оборудвани с радиостанции, за да осигурят радиоприем и смущения на домакински приемници и телевизори от близко разстояние. В проводниците от запалителната намотка към разпределителя и от дистрибутора към свещите се поставят резисторите за потискане със стойност на съпротивление от 7 до 15 kOhm, направени под формата на азбест, покрит с въглерод или други материали, смесени с бакелит или друг лак, съдържащ се в карбоколит. В разпределителните разпределители на повечето автомобили потискащ резистор е контактен ъгъл, монтиран в централния вход на капака на разпределителя. Потискащият резистор също е монтиран на разпределителния ротор. Когато използвате екранирани свещи, потискащият резистор е монтиран вътре в екрана на свещта. Заедно с инсталирането на потискащи резистори се използват проводници, поглъщащи смущения с високо напрежение с високо съпротивление (15-40 KOH / m), разпределено съпротивление, чиято сърцевина е памучен шнур, сплетен с капрон и импрегниран с полупроводников състав на базата на ацетилен сажди и други вещества. Прилагат се и проводници, поглъщащи шума PVVP, в които сърцевината е шнур от ленени прежди, затворени в ферито-пластмасова обвивка. Върху тази обвивка се навива проводник. Отвън проводникът е изолационна обвивка от поливинилхлорид. Месинговите накрайници са фиксирани в краищата на проводниците. Феритопластичната обвивка и проводниковата бобина абсорбират високочестотна енергия, намалявайки смущения. Потискащите резистори намаляват амплитудите на тока във високочестотни осцилационни вериги и допринасят за гасенето на дъговия разряд, което намалява силата на електромагнитните трептения и следователно радиуса на смущения. Някои автомобили използват 0,25-0,5 μF блокиращи кондензатори, които включват паралелно с искровите контакти, сензорите на тестовите инструменти, както и арматурата на постояннотоковия генератор и двигателя на чистачките на предното стъкло. Блокиращите кондензатори нарушават честотата на трептенията в искровите вериги, а импулсната енергия на електромагнитните вълни се изразходва за заряда на кондензаторите и се гаси в тях, което значително намалява нивото на смущения. Някои автомобили използват 0,25-0,5 μF блокиращи кондензатори, които включват паралелно с искровите контакти, сензорите на тестовите инструменти, както и арматурата на постояннотоковия генератор и двигателя на чистачките на предното стъкло. Блокиращите кондензатори нарушават честотата на трептенията в искровите вериги, а импулсната енергия на електромагнитните вълни се изразходва за заряда на кондензаторите и се гаси в тях, което значително намалява нивото на смущения. Някои автомобили използват блокиращи кондензатори 0,25-0,5 μF, които включват паралелно с искровите контакти, сензорите на измервателните уреди, както и анкерите на генератора на постоянен ток и двигателя на чистачката на предното стъкло. Блокиращите кондензатори нарушават честотата на трептенията в искровите вериги, а импулсната енергия на електромагнитните вълни се изразходва за заряда на кондензаторите и се гаси в тях, което значително намалява нивото на смущения.
Схеми на електрическо оборудване на автомобили.
Електрическото оборудване на съвременните автомобили е сложен комплекс от източници на електрическа енергия, устройства за запалване, електродвигатели, управляващи устройства, външни осветителни и сигнални устройства, различни комутационни устройства, свързващи проводници, обединени в обща електрическа система.Потребителите с висока мощност, които работят за кратки периоди от време, както и устройства, които са необходими при аварийни ситуации, се свързват директно към акумулатора, в други случаи едножична система за захранване на енергия към потребителите („-“ – каросерия на автомобила, „+“ – проводник). Това е стартер, термостат и уреди за предварително нагряване, аларма, прекъсвачи за включване, преносим гнездо за фенерче. Други потребители са свързани към амперметър-генераторната линия.За да се намали контактът и да се намали цената на проводниците на автомобилите, се използва групов прекъсвач, когато няколко вериги са защитени от един предпазител.Не свързвайте взаимозаменяеми устройства към един предпазител. Маркират се изходите на електрическото оборудване с помощта на цифри и букви.За улесняване на инсталирането, отстраняването на неизправности и ремонта на електрическата мрежа на автомобилите се използват проводници от различни цветове: бяло, жълто, оранжево, червено, розово, синьо, зелено, кафяво, черно, сиво и лилаво. Върху плътен цвят е позволено да се прилага допълнителен цвят под формата на пръстени или ивици (бяло, черно, червено, синьо) .Изолацията на проводниците на автомобила е поливинилхлоридна пластмаса. Той е устойчив на масло, бензо и киселини, не разпространява горенето, работи при високи и ниски температури.Когато избирате напречно сечение, трябва да вземете предвид тока от изчисляването на отоплението, напрежението във веригата, механичната якост и метода на полагане (единичен или лъч). В зависимост от вида на жицата, напречното сечение може да бъде, mm 2 :0,5; 0.75; 1.0; 1.5; 2.5; 4.0; 6.0; 10; 16; 25; 35; 50; 70 и 95. По-долу е връзката между напречното сечение на проводника, неговото съпротивление и допустимия ток при непрекъснато натоварване и при околната температура 80 ° C:
Таблица 10.1
| Напречно сечение на проводника, mm 2 | 0.5 | 0.75 | 1.0 | 1.5 | 2.5 | 4.0 | 6.0 | 16.0 |
| Електрическо съпротивление, Ом / m x 10 -2 | 3.7 | 2.5 | 1.85 | 1.2 | 0.72 | 0.46 | 0.29 | 0.1 |
| Допустим ток, A при t = 80 ° C | 9.5 | 12.5 | 15.0 | 19.0 | 26.0 | 35.5 | 47.0 | 88.5 |
Схемата е предназначена да улесни отстраняването на неизправности, разбирането на работата на електрическото оборудване и неговото управление. Той трябва да даде представа за взаимодействието на всички продукти, принадлежащи към веригата, и способността да се проследяват текущите пътища в електрически вериги.
Какво представлява CAN
CAN е абревиатура на Controller Area Network. CAN е нов начин на комуникация с автомобила при извършване на диагностика.За разлика от по-старата ISO9141 система, която използва единична К-линия за комуникация, новата CAN-Bus система използва усукана двойка кабели с диференциален сигнал. CAN е значително по бърза от ISO9141 (500 kbps вместо 10.4 kbps). И двете – новия хардуер и новия софтуер са задължителни за да може да се провежда диагностика на автомобилите които използват CAN за диагностика.CAN е мулти-главен сериен стандарт за свързване на електронни управляващи блокове [ECU], известен също като възли. Две или повече възли са необходими в мрежата CAN, за да комуникират. Сложността на възела може да варира от обикновено I / O устройство до вграден компютър с CAN интерфейс и сложен софтуер. Възелът може също да бъде шлюз, позволяващ на компютър с общо предназначение (като лаптоп) да комуникира през USB или Ethernet порт към устройствата в CAN мрежата.Всички възли са свързани помежду си чрез двужилна шина. Проводниците са усукана двойка с 120 Ω (номинален) характерен импеданс.
ISO 11898-2 , наричан също CAN с висока скорост (битови скорости до 1Mb / s на CAN, 5Mb / s на CAN-FD), използва линейна шина, завършваща на всеки край с резистори 120 Ω.
Високоскоростната CAN сигнализация задвижва високия CAN проводник към 5 V, а CAN ниската жица към 0 V, когато предава доминант (0), и не задвижва нито една жица, когато предава рецесивно (1). Определянето на „0“ като доминиращо дава на възлите с по-ниски идентификационни номера приоритет на шината. Доминиращото диференциално напрежение е номинално 2 V. Прекъсващото съпротивление пасивно връща двата проводника до номинално диференциално напрежение 0 V. Доминиращото напрежение в общ режим трябва да бъде общо от 1,5 до 3,5 V, а рецесивното общо напрежение трябва да бъде в +/- 12 от общи.
ISO 11898-3 , наричан също CAN с ниска скорост или повреда на CAN (до 125 Kbps), използва линейна шина, звездна шина или множество звездни шини, свързани с линейна шина и се прекратява във всеки възел с част от общото съпротивление на прекратяване. Общото съпротивление за прекратяване трябва да бъде около 100 Ω, но не по-малко от 100 Ω.
CAN сигнализация с ниска скорост / повреда задвижва CAN проводника към 5 V, а CAN ниският проводник към 0 V, когато предава доминант (0), и не задвижва нито една жица, когато предава рецесивно (1). Доминиращото диференциално напрежение трябва да бъде по-голямо от 2,3 V (с 5 V Vcc), а рецесивното диференциално напрежение трябва да бъде по-малко от 0,6 V Затварящите резистори пасивно връщат CAN ниския проводник до RTH, където RTH е минимум 4,7 V (Vcc – 0,3 V, където Vcc е 5 V номинално) и CAN проводникът с висок ток до RTL, където RTL е максимум 0,3 V. И двата проводника трябва да могат да се справят от -27 до 40 V без повреди.Както CAN, така и ниската скорост, скоростта на прехода е по-бърза, когато възникне рецесивен към доминиращ преход, тъй като CAN проводниците се задвижват активно. Скоростта на доминиращия към рецесивния преход зависи преди всичко от дължината на CAN мрежата и капацитета на използвания проводник.Високоскоростната CAN обикновено се използва в автомобилни и промишлени приложения, където шината се движи от единия край на околната среда до другия. CAN често се използва, когато групи от възли трябва да бъдат свързани.Спецификациите изискват шината да се поддържа в рамките на минимално и максимално общо напрежение в шината, но не определяйте как да поддържате шината в този диапазон.CAN шината трябва да бъде прекратена. Прекратяващите резистори са необходими за потискане на отраженията, както и за връщане на шината в нейното рецесивно или празно състояние.Високоскоростната CAN използва 120 Ω резистор във всеки край на линейна шина. CAN с ниска скорост използва резистори на всеки възел. Могат да се използват и други типове терминации, като веригата на прекъсване на отклонение, дефинирана в ISO11783.
Фиг.1.1
А) Видове BUS системи в автомобилите
| CAN-C | CAN-B | LIN | TTP | |
| Определение | Контролна мрежа | Контролна мрежа | Локална интерконектна мрежа | Времево-превключващ протокол |
| Вид BUS шина | Стандартен | Стандартен | Стандартен | Стандартна или оптична шина |
| Области | Задвижване | Комфорт/удобство | Комфорт/удобство | Безопасност |
| Приложение | Управление на двигателя, контрол на трансмисията, ABS/ESP мрежи | Комфорт и удобство | Ниско-струващо разширение на CAN-шина за единично приложение в електронната област на комфорта и удобството | Системи за безопасност, като спирачки, управление, сигнализация в ж.п. транспорта, системи за приземяване на самолети |
| Най-често използвана топология |
Линейна шина |
Линейна шина |
Линейна шина |
Топология тип звезда |
| Ниво на трансфер на данни |
10kBit/s÷1Mbit/s |
Max 125kBit/s |
Max 20kBit/s |
Неуточнено, типично 10Мbit/s |
| Максимален брой възли | 10 | 24 | 16 | Неуточнени |
| Контролен механизъм | Управляемо събитие | Управляемо събитие | Управляемо време | Управляемо време |
| BUS линия | Медни проводници (усукана двойка) | Медни проводници (усукана двойка) | Медни проводници (усукана двойка) | Медни проводници (усукана двойка) |
| Приложение | Всички превозни средства | Всички превозни средства | Всички превозни средства | Превозни средства премиум класа, самолети, системи за контрол на железниците |
| Стандарт | ISO 1198 | ISO 11519-2 | LIN консорциоум | TTA груп |
| SAE класификация | Клас С | Клас B | Клас А | Drive-by-wire |
| MOST Bus | Bluetooth | Flexray | ||
| Определение | Медийно ориентирани системи за транспорт | Непатентно наименование | Време-превключващ протокол | |
| Вид BUS шина | Оптична | Безжична | Стандартна или оптична шина | |
| Области | Мултимедия и развлечение | Мултимедия и развлечение | Всички сфери | |
| Приложение | Предаване на контрол, аудио- и видеоинфор
мация |
Предаване на данни на кратки разстояния, напр.интеграция на мобилни телефони в системата за развлечения | Мрежова система за използване в безопасността и единични приложения | |
| Най-често използвана топология |
Топология тип пръстен |
Мрежова топология (радио) |
Топология тип звезда | |
| Ниво на трансфер на данни |
Max 22,5Mbit/s |
Max 3MBit/s(v2.0) Max 7233kBit/s(v1.2) |
Тип.10MBit/s
Max.20МBit/s |
|
| Максимален брой възли | 64 | 8 активни
(до 256 пасивни) |
Теоретично до 2,048
Max.22 за пасивна шина/звезда |
|
| Контролен механизъм | Управляемо събитие и време | Управляемо събитие | Управляемо събитие и време | |
| BUS линия | Гъвкави или стъкленооптич
ни вълноводи |
Електромагнитни и радиовълни | Медни проводници (усукана двойка) | |
| Приложение | Превозни средства премиум класа, произведени в европейски заводи | Всички превозни средства, връзка между мултимедийно оборудване и система за развлечение | Пилотно приложение | |
| Стандарт | MOST кооперация (сътрудничест во) | Bluetooth SIG | Flexray консорциум | |
| SAE класифика ция | Mobile media | Wireless | Drive-by-wire |
Б) Предаване на съобщения
1.Transmiter (предавател на данни) – възел, създаващ съобщение. Възелът продължава да е трансмитер, докато шината за предаване на данни е свободна или възелът загуби достъпа до шината.
2.Receiver (приемник) – един възел се нарича приемник на съобщение, ако не е предавател на съобщение и шината не е свободна.
1.Message format (формат на съобщението)
Предаването на съобщението се базира на четири различни рамкови формата:
Data frame (рамка на данните) – предаваното съобщение съдържа данна (например текущата скорост на двигателя), която се обезпечава от предавателната станция (източника на данната).
Remote frame (непряка рамка) – станцията може да заяви данните, от които се нуждае от източника на данни (например: чистачките на предното стъкло изискват от сензора за дъжд, информация колко влажно е предното стъкло). Източникът на данни отговаря чрез изпращане на съответна рамка от данни.
Error frame (рамка на грешката) – ако станцията открие дефект или грешка тя съобщава това на другите станции, използвайки рамката на грешките.
Overload frame (рамка за претоварване) – тя може да бъде използвана за създаване на закъснение между следващата рамка от данни или отдалечената.
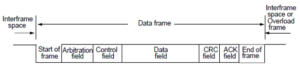
За трансфера на данни върху шината се създава рамка на съобщението. Тя съдържа информацията, която трябва да бъде предадена, в определена последователност. CAN подържа два различни формата рамки – CAN 2.A и CAN2.B. Най-важната разлика между тези два формата е дължината на идентификатора. Една CAN 2.A рамка съдържа 11-битов идентификатор, докато CAN2.B рамката има 29-битов идентификатор, разделен на две части (11 бита и 18 бита). Двата формата са съвместими един спрямо друг и могат да се използват заедно в една мрежа. Структурата на рамката е показана на фиг.11.1. Тя може да се състои от 130 бита (стандартен формат) или 150 бита (разширен формат).
Фиг.11.2.
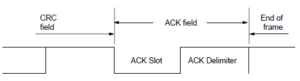
В CAN 2.A и CAN2.B формата рамки, последователността на предаване на информацията е една и съща. Началният бит на рамката се следва от арбитражното, контролното, полето от данни и CRC полето. Рамката се завършва от АСК полето и края на рамката.
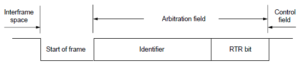
Start of frame (начало на рамката) – шината за данни е отстъпваща ( recessice) при неработно състояние.Старта на рамката, представена чрез доминантен бит, индицира начало на съобщението и заедно с процеса на пълнене на бита синхронизира всички станции. Началото на рамката маркира началото на рамката от данни и непряката рамка. Състои се от единичен доминантен бит. На един възел му е разрешено да предава данни, ако шината е свободна. Всички възли трябва да се синхронизират към водещия край на старта на рамката на възела, започнал предаването пръв.
Arbitration field (арбитражно поле) – при рамка CAN 2.0A, арбитражното поле се състои от 11-битов идентификатор и контролен бит (RTR bit – Remote Transmission Request – молба за отдалечено предаване). Тези 11 бита от идентификатора се предават подредени от ID10 до ID0. Май-маловажен е ID0. Седемте най-важни бита не трябва всички да са рецесивни. В рамката на данните RTR бита трябва да е доминантен. В отдалечената рамка RTR бита трябва да е рецесивен.
Фиг.11.3.
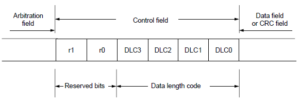
Contrrol field (контролно поле) – състои се от 6 бита. Те включват код за дължина на данните и два бита са запазени за бъдещо разширяване. Резервните битове трябва да са доминантни. Получателите допускат доминантните и рецесивните битове във всички комбинации.
Фиг.11.4.
Data length code (код за дължина на данните) – броят битове в полето за данни се посочва в този код. Той е широк 4 бита и се пренася чрез контролното поле. DLC битовете могат да кодират данни от 0 да 8 байта; други стойности не са позволени.
Data field (поле на данните) – това поле съдържа данните, които трябва да се предадат в рамката на данните. Може да съдържа от 0 до 8 байта, всеки от който съдържа 8 бита. Голям брой сигнали, може да бъдат пренесени, като единично съобщение (например: температура на двигателя и честота на въртене на двигателя).
CRC field (Cyclic Redundancy Check-sum) – циклична проверка чрез сумиране за излишък от информация. Съдържа 15 битова проверка чрез сумиране от единия до другия край на предишната рамка от началния бит до крайния бит от полето на данните. 16-я бит в това поле (CRC delimiter) е рецесивен и затваря проверката. Проверката чрез сумиране е начин за откриване на възможно наслагване в предаването на данни.

Фиг.11.5.
ACK field – дължината му е два бита и съдържа ACK Slot и ACK Delimiter. В АСК полето предаващият възел изпраща два рецисивни бита.
Получател, който е получил валидно съобщение коректно съобщава това на предавателя чрез изпращане на доминантен бит в АСК слота.
Фиг.11.6.
АСК Slot – всички възли, получили съответна CRC последователност съобщават това на АСК слота чрез презаписване на ресесивния бит на предавателя посредством доминантен бит.
AСK delimiter – АСК разграничителя е втория бит на АСК полето и трябва да е рецесивен бит. Като последствие АСК слота е заобиколен от два рецисивни бита (CRC Delimiter и AСK delimiter).
End of frame (край на рамката) – всяка рамка за данни и далечна рамка е определена чрез един редица флагове, състояща се от седем рецесивни бита.
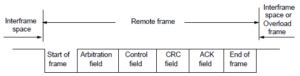
Remote frame – възел, действащ като получател на данни предизвиква съответен източник да му предаде данни чрез изпращане на далечна рамка.
Далечната рамка е структурирана от 6 различни бит – полета: Start of frame, arbitration field , Control field, CRC field, ACK field, End of frame.
RTR бита на далечната рамка е винаги рецесивен (за разлика от рамката за данни, където този бит е доминантен).
В далечната рамка няма поле за данни.
Фиг.11.7.
Поляритета на RTR бита индикира дали предаваната рамка е рамка с данни (RTR бита е доминантен) или далечна рамка (RTR бита е рецесивен).


Фиг.11.8.
Започвайки с моделите от 2000г. се използва усъвършенствана CAN система „Комфорт“ и шина CAN на информационно-командната система. Скоростта на предаване на данни на тези шини е 100 кбит/с. Понастоящем се използва обединена шина за CAN системата „Комфорт“ и информационно-командната система, която обменя данни с шината CAN на силовия агрегат през междумрежова връзка (интерфейс) (Gateway), вградена в комбинация от прибори.
В) Видове шини използвани в практиката
Имайки в предвид изискванията към честотата на предаваните сигнали, обема на информация и запазване на данни CAN шините се разделят на три вида:
- Шина CAN на силовия агрегат (бърза шина), позволяваща предаване на информация със скорост от 500 кбит/с. Тя служи за връзка между блоковете за управление на линиите на двигателя и трансмисията.
- Шина CAN на системата „Комфорт“ (бавна шина), позволяваща предаване на информация със скорост 100 кбит/с. Тя служи за връзка между блоковете за управление, влизащи в системата „Комфорт“.
- Шина от данни CAN на информационно-командната система (бавна шина), позволяваща предаване на данни със скорост 100 кбит/с. служи за връзка между различни обслужващи системи, например, радиосистема, телефонна и навигационна система.
Общо за всички тези системи се явява следното:
Системите позволяват еднакви предписания по предаване на данни, формулирани в съответния протокол;
За предаване на данни се използват два усукани проводника (Twisted Pair);
които ефективно се противопоставят на външните смущения (което е необходимо, например, при тяхното разположение в двигателния отсек). Един и същ сигнал се предава от трансивера в блока за управление чрез двата проводника на шината, но на различни нива от напрежения: само в диференциалния усилвател на използвания блок за управление се формира един, изчистен от смущения сигнал, постъпващ впоследствие на входа на CAN шината. По своите свойства CAN шината на информационно-командната система съответства на CAN шината от системата „Комфорт“.
Има няколко различия в шините, изразяващи се в следното:
Изключването на шината CAN на силовия агрегат става незабавно или с малка задръжка след изключването на клема ‚15“ от захранващия източник;
Шината CAN на системата „Комфорт“ се захранва от клема „30“ и се намира обикновено в състояние на готовност. За да се намали натоварването в бордовата мрежа във времето, когато не е необходимо активно участие на тази шина в работата на общата система, при изключване на клема „15“ тя преминава в чакащ режим.
Шините CAN на системата „Комфорт“ и информационно-командната система запазват своята работоспособност при късо съединение или при замасяване на един от нейните проводници. При това става автоматично преминаване в режим на пренос на данни по един проводник.
Електрическите сигнали, постъпващи от CAN шината на силовия агрегат се различават от сигналите постъпващи от шината CAN на системата „Комфорт“ и информационно-командната система.
Г) Свойства на CAN шината
CAN шината е двупроводна шина с тактова честота 100 кбит/с (шина CAN от системата „Комфорт“ или информационно-командната система) или 500 кбит/с (шина CAN на силовия агрегат). CAN шината от системата „Комфорт“ и информационно-командната система се отнасят към бавните шини (Low Speed CAN), а CAN шината на силовия агрегат се счита за бързодействаща (High Speed CAN). Всичките свързани чрез CAN шина блокове за управление се свързват към нея паралелно. Един от проводниците на CAN шината се нарича горен (CAN High), а другият – долен (CAN Low). Два увити около себе си проводника образуват двойка (Twisted Pair).
Двупроводен кабел (Twisted Pair)
По тези проводници се обменят данни между блоковете за управление. Тези данни носят информация, например, за честотата на въртене на коляновия вал, нивото на гориво в резервоара и скоростта на автомобила. В снопа проводници проводниците на CAN шината са маркирани с оранжев цвят като основна маркировка. Проводникът High шина CAN на силовия агрегат е допълнително маркиран с черен цвят.
Проводникът High шина CAN на системата „Комфорт“ е допълнително маркиран със зелен цвят,
а същият проводник от информационно-командната система – с виолетов. Проводниците Low на всички шини CAN са допълнително маркирани с кафяв цвят. На фигурата проводниците на CAN шината са обозначени за нагледност с един цвят, а именно жълт или зелен. При това проводникът CAN High е обозначен винаги със жълт цвят, а проводника CAN Low — със зелен.
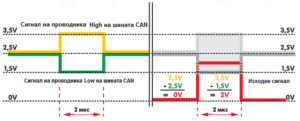
Диференциално предаване на данни по CAN шината на силовия агрегат
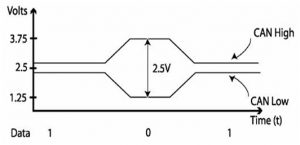
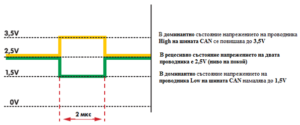
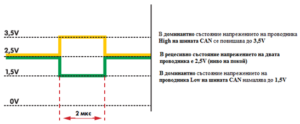
В изходно състояние на шината на двата проводника се подържа постоянно напрежение на определено базово ниво. При CAN шината на силовия агрегат това напрежение е около 2,5V. Ако напрежението е на базово ниво се говори за т.нар. „рецесивно състояние“. При преминаване към „доминантно състояние“ напрежението на CAN High проводника се повишава до определена степен, което в случая е не по-малко от 1V. По този начин при преминаване на CAN шината в активно състояние напрежението на CAN High проводника достига до 3,5V, a на CAN Low до 1,5V. Ако CAN шината се намира в рецесивно състояние напрежителната разлика между проводниците й е нула, а в доминантно – не по-малко от 2V.
Фиг.11.11.
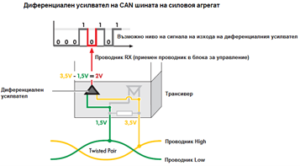
Преобразуване в трансивера на сигнали, предавани по проводниците High и Low на шината CAN
Всеки от блоковете за управление е свързан към шината CAN на силовия агрегат чрез отделен трансивер. В трансивера има приемник на сигнали. Този приемник е диференциален усилвател, поставен на входа на трансивера. В диференциалния усилвател се обработват сигналите, постъпващи по проводниците CAN High и CAN Low. В последствие обработените сигнали се подават на входа на блока за управление. По същество тези сигнали са напрежение на изхода на диференциалния усилвател. Диференциалния усилвател формира това напрежение като разлика между напреженията UCAN_High и UCAN_Low на проводниците High и Low на шината CAN. По този начин се изключва влиянието на големината на базовото напрежение ( при шината CAN на силовия агрегат то е 2,5V) или каквото е да е друго напрежение, предизвикано, например, от външни смущения.
Фиг.11.12.
Обработка на сигнала от диференциалния усилвател на шината CAN на силовия агрегат
Сигнали на входа Сигнал на изхода
Фиг.11.13.
В противоположност на шината CAN на силовия агрегат при шината CAN на системата „Комфорт“ и информационно-командната система е използван по-усъвършенстван ДУ. За да осигури „еднопроводно“ предаване на данни, този усилвател допълнително обработва отделните сигнали , постъпващи по проводниците HIGH и LOW.
Филтриране на смущенията от ДУ при шината CAN на силовия агрегат
Проводниците на шината са частично положени в пространството под капака, където е възможно в тях да възникнат различни смущения. Причините за тези смущения могат да бъдат късо съединение към „маса“ или „+“ на батерията, както и пробиви в запалителната система и разряди от статично електричество при техническо обслужване на автомобила.

Фиг.11.14.
Благодарение на това, че проводниците на CAN шината са усукани смущаващият импулс предизвиква в тях еднакво въздействие. Така в ДУ напрежението в проводника LOW (1,5V – Х) се вади от напрежението на проводника High (3,5V – Х), и в обработения сигнал смущенията отсъстват. (3,5V – X) – (1,5V – X) = 2V
Д) Усилване на сигналите от блока за управление в трасивера
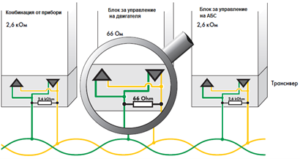
Предаваните от различните блокове за управление сигнали е необходимо да се усилят до ниво, за което са пресметната приемателните устройства на всичките други блокове за управление, свързани към CAN шината. Свързаните към CAN шината блокове за управление имат определено входно съпротивление, което образува натоварването на проводниците от шината. Сумарното натоварване зависи от броя на включените към шината блокове за управление и от техните изходни съпротивления. Например, включения към CAN шината на силов агрегат блок за управление на двигателя създава натоварване 60Ω между проводниците CAN High и CAN Low. Другите блокове за управление натоварват шината със съпротивление 2,6 кΩ всеки. В зависимост от броя на включените блокове натоварването на шината може да достигне от 53 до 66Ω. Ако се изключи клемата 15 (запалване) от захранването може да се измери това съпротивление с омметър.
Трансиверът служи за предаване на сигнали на двата проводника от CAN шината. При това увеличаването на напрежението на проводника High е числено равно на неговото понижаване на проводника Low. Изменението на напрежението на всеки проводник от CAN шината на силовия агрегат е не по-малко от 1V, а на всеки проводник от CAN шината на системата „Комфорт“ и информационно-командната система – не по-малко от 3,6V.
Товарни съпротивления между проводниците High и Low на CAN шината.
Фиг.11.15.
12.2.Характеристики на системите
А) Свойства и особенности на CAN шината на силовия агрегат
CAN шината на силовия агрегат, предаваща данни със скорост 500 кбит/с, свързва всички блокове за управление, обслужващи този агрегат. Например, към CAN шината на силовия агрегат може да бъдат свързани следните прибори:
– блок управление на двигателя,
– блок за управление на АБС,
– блок за управление на движението с постоянна скорост,
– блок за управление на скоростната кутия,
– блок за управление на въздушните възглавници,
– комбинация от прибори.
CAN шината на силовия агрегат е изпълнена като всички подобни шини по двупроводна схема. Работи с тактова честота 500 кбит/с, поради което се отнася към бързодействащите шини. По проводниците High и Low на шината се осъществява обмен на данни между включените към нея блокове за управление. Тези блокове изпращат повтарящи се пакети от данни с честота 10-25мс. Включването на CAN шината на силовия агрегат към захранване става през клема 15 (запалване), а пълното и изключване става чрез малка задръжка след изключване на запалването.
Фиг.11.16.
Предаване на сигнали по проводниците на CAN шината на силовия агрегат.
На фигурата са показани сигнали на реално работеща CAN шина. Нивото, на което се допират сигналите, съответства на рецесивната стойност на напрежението от 2,5V. Доминантното напрежение на проводника High е приблизително 3,5V, а на проводника Low – 1,5V.
Б) Свойства и особености на шините CAN на системата „Комфорт“ и информационно-управляващата система
Към шините CAN на системата „Комфорт“ и информационно-управляващата система може да бъдат свързани следните прибори:
– блок за управление на системата Climatronic или климатичната система,
-блок за управление на вратите на автомобила,
-блок за управление на системата „Комфорт“,
– блок управление с дисплей за радио- и навигационната система.
Шините CAN на системите „Комфорт“ и информационно-управляващата система са двупроводни, както и всичките CAN шини. Тъй като, тактовата и честота е само 100 кбит/с, те се считат за бавни шини (Low Speed CAN). По проводниците High и Low се осъществява обмен на данни между блоковете за управление, например, предават се съобщения за затворени или отворени врати, включен или изключен плафон на салона, за положението на автомобила (с GPS система) и др. Шините CAN на системите „Комфорт“ и информационно-управляващата система може да имат обща двойка проводници, т.к. работят с еднаква тактова честота.
В) Диференциално предаване на данни по обединена шина на системите „Комфорт“ и информационно-управляващата система
С цел висока шумоустойчивост на системата Low Speed CAN при повишаване на нейната надеждност и намаляване консумацията на електроенергия, в конструкцията на шините CAN на системите „Комфорт“ и информационно-управляващите системи са въведени някои елементи, които отсъстват в шината CAN на силовия агрегат. Първоначално са ликвидирани взаимовръзките между разпространяваните по проводниците на шините сигнали, използвайки отделни драйвери (усилватели на мощност). Впоследствие е отстранена електрическата връзка между проводниците на CAN шината през товарните съпротивления, както е при CAN шината на силовия агрегат. В резултат – проводниците High и Low на шините не си влияят и може да работят независимо един от друг. Липсва и общо базово напрежение. Напрежението на проводника High при рецесивно състояние на шината е нула, а при доминантно нараства до не по-малко от 3,6V. Напрежението на проводника Low при рецесивно състояние на шината е 5V, а при доминантно пада до не по-малко от 1,4V. Вследствие на това след образуване на разликата в напреженията в диференциалния усилвател (ДУ) при рецесивно състояние нивото на сигнала е -5V, а при доминантно – нивото е 2,2V. По този начин разликата между напреженията при рецесивно и доминантно състояние на шината е равна или по-голяма от 7,2V.
Г) Трансивер на шините CAN на системите „Комфорт“ и информационно-управляващата система
Принципът на действие на трансивера на шината CAN на системата „Комфорт“ и информационно-управляващата система и трансивера на шината CAN на силовия агрегат практически не се различава. Различия има само в нивото на сигналите и възможността за предаване на данни по един проводник High или Low. Освен това, това дава възможност за откриване на късо съединение между проводниците на шината и изключване на драйвера на проводника Low при такова съединение. В последния случай по проводниците High и Low се разпространява един и същ сигнал. Обменът на данни по проводниците High и Low на шината CAN става под контрола на вградения в трансивера логически клетки. В тази клетка се обработват сигнали, предавани по двата проводника на шината. Логическата клетка е способна да разпознае неизправност (например прекъсване на единия от проводниците на шината). В такъв случай се обработват сигнали, постъпващи само по изправния проводник (еднопроводно предаване на данни). При изправно действаща шина се обработва разликата между сигналите, получавани по проводниците High и Low (диференциално предаване на данни). Смущенията, действащи едновременно на двата проводника на тази шина, се минимизират толкова надеждно, колкото при шината CAN на силовия агрегат.
Д) Работа на шината CAN на системите „Комфорт“ и информационно-управляващата система в режим на еднопроводно предаване на данни.
Преминаването на CAN шината на т.нар. еднопроводен режим на предаване на данни става при прекъсване, късо съединение или къко съединение към „плюс“ на един от нейните проводници. При работа в този режим се обработват само сигналите, постъпващи по единия проводник. Така CAN шината съхранява своята работоспособност. Обработката на сигналите в самия блок за управление не се нарушава. БУ получава информация за работата на трансивера в двупроводен или еднопроводен режим на работа чрез специален диагностичен извод.
Е) Свързване на CAN шината чрез междумрежов интерфейс.
Непосредственото свързване на CAN шината на силовия агрегат и системата „Комфорт“ не е възможно поради различните нива на напрежението и различните товарни съпротивления. Още повече, че скоростта на предаване на данни по шините е различна, което изключва възможността за обработка на разнотипни сигнали в едно устройство. Необходимо е използването на преобразувател за връзка между шините. Такъв преобразувател е т.нар. мрежов интерфейс (Gateway). В автомобилите такъв интерфейс може да бъде вграден в комбинацията от прибори, както и да бъде отделен в отделен уред за междумрежова връзка. Т.к. в интерфейса постъпва цялата предавана по шините информация, той се използва още за извеждане на диагностична информация.
Процедура за проверка на надеждността на CAN шината с осцилоскоп.
Идентифицирайте CAN-H и CAN-L щифтовете на достъпна точка в CAN мрежата.
Такъв момент обикновено е многопосочният конектор ECU.Задайте входовете на осцилоскопа на 5V
Свържете проводника за изпитване на сигнал на един от каналите на осцилоскопа към проводника CAN-H.След това свържете заземяващия кабел към земята на шасито.Свържете изпитвателния провод на сигнала на един от другите канали на осцилоскопа към проводника CAN-L.Включете запалването.Гледайте екрана на осцилоскопа. Трябва да спазвате следните форми на вълната.Измерването позволява да се извършват следните проверки:Проверете дали нивата на пиково и максимално напрежение са правилни
Проверете дали сигналът присъства и на двата CAN проводника (CAN използва диференциална сигнализация, така че сигналът на една линия трябва да бъде огледален образ на данните на другата линия).
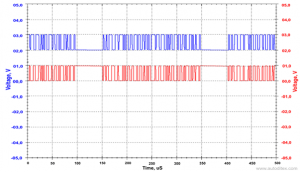
Фиг.1.2 (Осцилограмата се предоставя с любезното съдействие на АУТО ДИТЕКС ООД )
Възможни резони за повреда в CAN BUS мрежата :Нивата на максимално напрежение не са правилни. Сигналът не присъства и на двата CAN проводника.Стандартът IS 11898 изброява няколко режима на отказ на кабела CAN шина:
CAN_H прекъсна
CAN_L прекъсна
CAN_H къси до напрежението на батерията
CAN_L къса до земята
CAN_H къси до земята
CAN_L е късо до напрежението на батерията
CAN_L къса до CAN_H проводник
CAN_H и CAN_L прекъснаха на едно и също място
Загуба на връзка с мрежата за прекратяване.